Pohyb po kružnici#
import numpy as np
Rovnoměrný pohyb po kružnici#
Rovnoměrný pohyb po kružnici je specifický typ pohybu, při kterém se objekt pohybuje po kružnici konstantní rychlostí.
Například jakýkoli bod na vrtuli rotující konstantní rychlostí vykonává rovnoměrný kruhový pohyb. Dalšími příklady jsou sekundová, minutová a hodinová ručička hodinek. Je pozoruhodné, že body na těchto rotujících objektech skutečně zrychlují, i když je rychlost rotace konstantní. Abychom to pochopili, musíme analyzovat pohyb pomocí vektorů.
Parametry rovnoměrného kruhového pohybu (1DOF - skalární popis)#
Úhlová poloha (\(\varphi\)):
Udává polohu tělesa na kružnici vzhledem k referenčnímu bodu (obvykle počátek).
Měří se v radiánech (rad).
Změna úhlové polohy s časem popisuje pohyb tělesa po kružnici.
Úhlová rychlost (\(\omega\)):
Udává změnu úhlové polohy za jednotku času.
\[\omega = \frac{d\varphi}{dt}\]Měří se v radiánech za sekundu (rad/s).
Při rovnoměrném pohybu po kružnici je úhlová rychlost konstantní.
Frekvence (\(f\)):
Udává počet oběhů za jednotku času.
\[f = \frac{\omega}{2\pi}\]Měří se v hertzích (Hz).
Frekvence je převrácená hodnota periody.
Perioda (\(T\)):
Udává dobu potřebnou k vykonání jednoho oběhu.
\[T = \frac{1}{f} = \frac{2\pi}{\omega}\]Měří se v sekundách (s).
Obvodová rychlost (\(v\)):
\[v = r\omega\], kde \(r\) je poloměr kružnice.
Obvodová rychlost je tečná k trajektorii.
Pohyb tělesa lze popsat pomocí úhlové polohy jako funkce času:
\(\varphi(t) = \varphi_0 + \omega t\)
Kde:
\(\varphi(t)\) je úhlová poloha v čase \(t\)
\(\varphi_0\) je počáteční úhlová poloha (fáze pohybu)
\(\omega\) je úhlová rychlost
Dostředivé zrychlení#
V jednorozměrné kinematice mají objekty s konstantní rychlostí nulové zrychlení. Nicméně, ve dvou a trojrozměrné kinematice, i když je rychlost konstantní, může mít částice zrychlení, pokud se pohybuje po zakřivené trajektorii, jako je kružnice. V tomto případě se vektor rychlosti mění, nebo
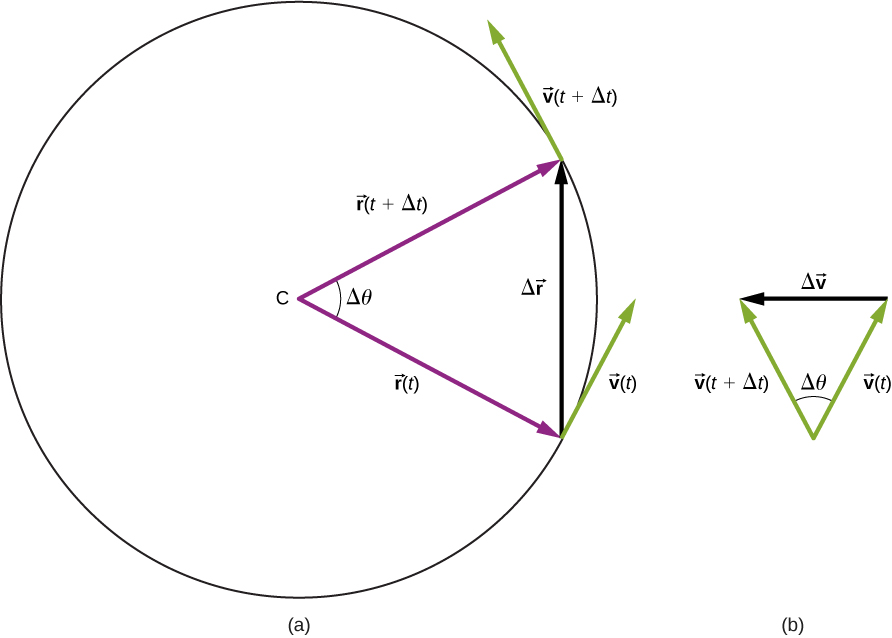
Jak se částice pohybuje proti směru hodinových ručiček v čase \(\Delta t\) po kruhové dráze, její polohový vektor se posouvá z \( \vec{r}(t)\) na \(\vec{r}(t+\Delta t)\). Vektor rychlosti má konstantní velikost a je tečnou k dráze, když se mění z \(\vec{v}(t)\) na \(\vec{v}(t+\Delta t)\) mění se pouze jeho směr. Protože vektor rychlosti \(\vec{v}(t)\) je kolmý k polohovému vektoru \(\vec{r}(t)\) jsou trojúhelníky tvořené polohovými vektory a \(\Delta\vec{r}\) a vektory rychlosti \(\Delta \vec{v}\) podobné. Navíc, protože \( |\vec {r}(t)|=|\vec{r}(t+\Delta t)|\) a \(|\vec{v}(t)|=|\vec{v}(t+\Delta t)|\) jsou oba trojúhelníky rovnoramenné. Z těchto skutečností můžeme učinit tvrzení
nebo
Velikost zrychlení můžeme najít z:
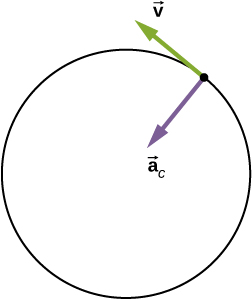
Směr zrychlení lze také najít pozorováním, že když se \( \text{Δ}t \) a tedy \( \text{Δ}\theta \) blíží nule, vektor \( \text{Δ}\overset{\to }{v} \) se blíží směru kolmému na \( \overset{\to }{v}. \) V limitě \( \text{Δ}t\to 0,\) \( \text{Δ}\overset{\to }{v} \) je kolmý na \( \overset{\to }{v}. \) Protože \( \overset{\to }{v} \) je tečna ke kružnici, zrychlení \( \frac{d\overset{\to }{v}}{dt} \) směřuje do středu kružnice. Shrnutím, částice pohybující se po kružnici konstantní rychlostí má zrychlení o velikosti
Směr vektoru zrychlení směřuje do středu kružnice. Toto je radiální zrychlení a nazývá se dostředivé (centropetální) zrychlení, proto mu dáváme dolní index c.
Note
Slovo centripetální pochází z latinských slov centrum (což znamená „střed“) a petere (což znamená „hledat“), a má tedy význam „hledající střed“.
Nerovnoměřný pohyb po kružnici#
Kruhový pohyb nemusí být nutně konstantní rychlostí. Částice se může pohybovat po kružnici a zrychlovat nebo zpomalovat, což ukazuje zrychlení ve směru pohybu.
V rovnoměrném kruhovém pohybu má částice vykonávající kruhový pohyb konstantní rychlost a kružnice má pevný poloměr. Pokud se rychlost částice také mění, pak zavádíme další zrychlení ve směru tečném ke kružnici. Taková zrychlení se vyskytují v bodě na setrvačníku, který mění svou rychlost otáčení, nebo u jakéhokoli zrychlujícího rotoru. Pokud se rychlost částice mění, pak má tečné zrychlení, které je časovou rychlostí změny velikosti rychlosti:
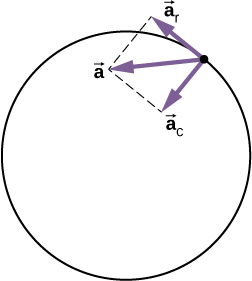
Směr tečného zrychlení je tečný ke kružnici, zatímco směr dostředivého zrychlení je radiálně dovnitř směrem ke středu kružnice. Částice v kruhovém pohybu s tečným zrychlením má tedy celkové zrychlení, které je vektorovým součtem dostředivého a tečného zrychlení:
Vektory zrychlení jsou znázorněny na (Obrázku). Všimněte si, že oba vektory zrychlení \( {\overset{\to }{a}}_{\text{C}} \) a \( {\overset{\to }{a}}_{\text{T}} \) jsou navzájem kolmé, s \( {\overset{\to }{a}}_{\text{C}} \) v radiálním směru a \( {\overset{\to }{a}}_{\text{T}} \) v tečném směru. Celkové zrychlení \( \overset{\to }{a} \) směřuje pod úhlem mezi \( {\overset{\to }{a}}_{\text{C}} \) a \( {\overset{\to }{a}}_{\text{T}}.\)