Tlumené vibrace#
import numpy as np
from matplotlib import pyplot as plt
Rovnice pohybu#
Pro odvození rovnice pohybu tlumených vibrací uvažujeme oscilátor s hmotností \(m\), tuhostí pružiny \(k\) a tlumicí silou úměrnou rychlosti, \(F_d\) = -bv\(, kde \)b$ je koeficient tlumení.
Podle druhého Newtonova zákona platí:
kde:
\(\sum F\) je výsledná síla působící na oscilátor
\(m\) je hmotnost oscilátoru
\(a\) je zrychlení oscilátoru

Výsledná síla je součtem vratné síly pružiny a tlumicí síly:
Dosazením do druhého Newtonova zákona dostaneme:
Tato rovnice je lineární, homogenní diferenciální rovnice druhého řádu s konstantními koeficienty. Určení typu diferenciální rovnice je důležité, protože přístup potřebný k jejímu řešení na něm závisí. K řešení diferenciálních rovnic tohoto typu se obvykle volí exponenciální ansatz.
Exponenciální řešení#
Rovnice je homogenní lineární diferenciální rovnice druhého řádu s konstantními koeficienty. Předpokládá se, že řešením takové diferenciální rovnice je exponenciální funkce. Tuto metodu poprvé popsal Leonard Euler.
Vytvořením první a druhé derivace získáme:
Dosazením těchto rovnic do diferenciální rovnice dostaneme:
Dělením oběma stranami \(C e^{\lambda t}\) se vztah zjednoduší na:
Tato rovnice se nazývá charakteristická rovnice. Je to kvadratická rovnice ve standardním tvaru, takže existují dvě řešení pro \(\lambda\):
Pro další zjednodušení zavádíme nové konstanty \(\delta\) a \(\omega\):
Rovnice se pak přepíše jako:
Další řešení závisí na hodnotách \(\lambda_1\) a \(\lambda_2\). Je nutné zvážit několik různých možností. Výraz uvnitř druhé odmocniny se nazývá diskriminant. V závislosti na volbě konstant \(\delta\) a \(\omega_0\) může být diskriminant větší než 0, menší než 0 nebo roven 0. Proto \(\lambda_1\) a \(\lambda_2\) mohou být:
Dvě různá reálná řešení.
Dvě komplexně sdružená řešení.
Dvě identická reálná řešení.
Každá z těchto možností vyžaduje jiný přístup k řešení. Obecné řešení homogenní diferenciální rovnice má tvar:
Funkce \(x_1(t)\) a \(x_2(t)\) jsou určeny hodnotou diskriminantu. Podívejme se nyní na různé možnosti.
Případ silně tlumený (overdamped) - aperiodický kmit#
Pokud \(\delta > \omega_0\), máme případ silného tření. Diskriminant v rovnici je kladný a existují dvě různá reálná řešení pro \(\lambda\). Řešení diferenciální rovnice pak vypadá takto:
Dosazením do rovnice dostaneme obecné řešení diferenciální rovnice:
Při zjednodušení rovnice můžeme vložit nový konstantní člen:
Po dosazení do rovnice získáme:
Toto je řešení pro případ silného tlumení. Konstanty \(C_1\) a \(C_2\) pro konkrétní úlohu mohou být určeny z počátečních podmínek, jako je počáteční pozice a počáteční rychlost kyvadla.
Kritický případ tlumení - mezně aperiodický kmit#
Mluvíme o kritickém tlumení, když \(\delta = \omega_0\). Jedná se o přechod od nadměrného tlumení k oscilaci. V tomto případě má rovnice jediné řešení pro \(\lambda\):
Mohlo by se zdát, že v tomto případě máme jenom jedno řešení:
Dané řešení ale není fyzikálně správné. Podle něho v čase \(t=0\) a při původní výchylce \(x_0\) je rychlost vždy rovna \(v_0 = v(0) = x_0 \lambda\). V podstatě ale v čase 0 můžeme umístnit oscilátor do libovolné polohy \(x_0\) s libovolnou rychlostí \(v_0\). Řěšení můžeme získat když uvážime silně tlumený případ, když \(\alpha \rightarrow 0\). Pro malé hodnoty \(\alpha\) můžeme napsat \(e^{\alpha t} = 1 + \alpha t \) a zároveň vztah $\( x(t) = e^{-\delta t} \left( C_1 e^{\alpha t} + C_2 e^{-\alpha t} \right) \)\( platí pro všechny \)C_1\( a \)C_2\(. Když si zvolíme \)C_2 = -C_1\( získáme \)\( x(t) = e^{-\delta t} \left( C_1 2 \alpha t \right) = t e^{\lambda t} (2 \alpha C_1) \)\( Protože pronásobením konstantou jenom změníme velikost neznámé konstanty \)C_1$ může pro druhé řešení napsat Použití exponenciálního řešení v tomto případě znamená použití následujícího postupu pro získání dvou dílčích řešení diferenciální rovnice:
Vložení do obecného řešení nám dává řešení pro kritický případ tlumení:
Integrační konstanty \(C_1\) a \(C_2\) musí být získány z počátečních podmínek konkrétního problému:
Podrobnosti pro výpočet konstant lze nalézt na Wolfram Alpha.
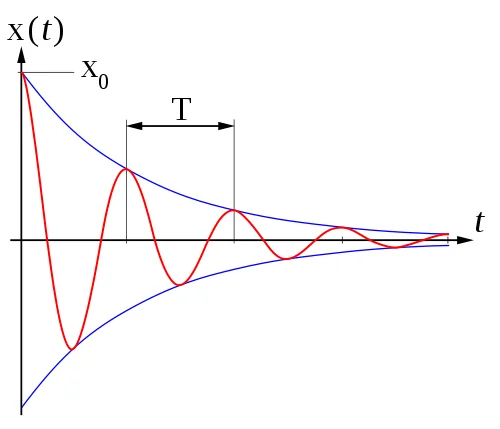
Tlumený harmonický kmit (underdamped)#
Tlumená oscilace nastává pro \(\delta < \omega_0\). V tomto případě je diskriminant v rovnici záporný. Proto \(\lambda_1\) a \(lambda_2\) jsou komplexní čísla. Exponenciální funkce \((x(t)=C e^{\lambda t}\) je řešením diferenciální rovnice.
Vyjádření $\lambda získáme:
Dané řešení vyjádřuje kmoplexní čísla. protože v podtlumeném případě je termín pod odmocninou záporný. Když nahradíme výraz pod závorkou novou veličinou \(\omega_d\), získáme
Jak uvidíme za chvíli, konstanta \(\omega_d\) představuje přirozenou frekvenci tlumeného harmonického oscilátoru. Řešení pohybové rovnice můžeme vyjádřit
Pro práci s komplexními čísly použijeme Eulerův vzorec, která spojuje komplexní exponenciální funkce s trigonometrickými funkcemi:
kde \(C_4\) je \(i (C_1-C_2)\). Ukázali jsme si, že součet dvojice harmonických kmitů se stejnou ferkevencí je možné vyjádřit jako jednou trigonometrickou funkcí, která obsahuje fázový posuv
kde
\(\omega_d\) je tlumená vlastní frekvence
konstanty \(A\) a \(\psi\) jsou amplituda a fáze a mohou být vypočteny z dané množiny počátečních podmínek.
Perioda tlumených kmitů je určena
a frekvence
kde \(f\) je frekvence vlastních kmitů
Součinitel tlumení#
Můžeme zavést veličinu, kterou označíme jako součinitel tlumení
V značení, které jsme používali v předcházejícím textu platí:
a tedy můžeme typ kmitů posoudit na základě hodnoty součinitele tlumení
\(\zeta > 1\) - aperiodický kmit
\(\zeta = 1\) - mezní aperiodický kmit
\(\zeta < 0\) - tlumené kmitání
Dodatečné informace#
Vizualizaci tlumeného kmitání s matematicky korektním odvozením je možné najít na https://beltoforion.de/en/harmonic_oscillator/.
Vizualizace#
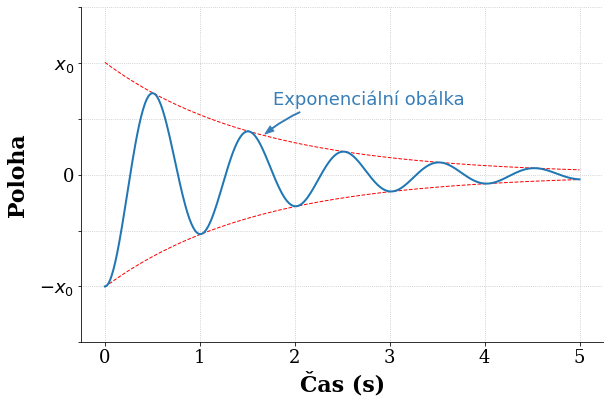
K vykreslení odezvy použijeme řešení diferenciální rovnici, kterou jsme odvodili. Řešení pro tlumený harmonický kmit je:
Abychom mohli tuto rovnici použít, musíme vyřešit pro \(c_1\) a \(c_2\) nebo \(a_1\) a \(a_2\) pomocí počátečních podmínek. Zde použijeme tvar sin/cos. Řešením rovnice pro obecnou počáteční rychlost \(\\dot{x} = v_0\) a obecnou počáteční výchylku \(x = x_0\) zjistíme:
# Define the System Parameters
m = 1.0 # kg
k = (2.0 * np.pi)**2. # N/m (Selected to give an undamped natrual frequency of 1Hz)
wn = np.sqrt(k/m) # Natural Frequency (rad/s)
z = 0.1 # Define a desired damping ratio
c = 2*z*wn*m # calculate the damping coeff. to create it (N/(m/s))
wd = wn*np.sqrt(1 - z**2) # Damped natural frequency (rad/s)
# Set up simulation parameters
t = np.linspace(0, 5, 501) # Time for simulation, 0-5s with 501 points in-between
# Define the initial conditions x(0) = 1 and x_dot(0) = 0
x0 = np.array([-1.0, 0.0])
# Define x(t)
x = np.exp(-z*wn*t)*(x0[0]*np.cos(wd*t) + (z*wn*x0[0] + x0[1])/wd * np.sin(wd*t))
# # Make the figure pretty, then plot the results
# # "pretty" parameters selected based on pdf output, not screen output
# # Many of these setting could also be made default by the .matplotlibrc file
# Set the plot size - 3x2 aspect ratio is best
fig = plt.figure(figsize=(6, 4))
ax = plt.gca()
plt.subplots_adjust(bottom=0.17, left=0.17, top=0.96, right=0.96)
# Change the axis units to serif
plt.setp(ax.get_ymajorticklabels(),family='serif',fontsize=18)
plt.setp(ax.get_xmajorticklabels(),family='serif',fontsize=18)
ax.spines['right'].set_color('none')
ax.spines['top'].set_color('none')
ax.xaxis.set_ticks_position('bottom')
ax.yaxis.set_ticks_position('left')
# Turn on the plot grid and set appropriate linestyle and color
ax.grid(True,linestyle=':',color='0.75')
ax.set_axisbelow(True)
# Define the X and Y axis labels
plt.xlabel('Čas (s)', family='serif', fontsize=22, weight='bold', labelpad=5)
plt.ylabel('Poloha', family='serif', fontsize=22, weight='bold', labelpad=10)
amp = np.sqrt(x0[0]**2 + ((z*wn*x0[0] + x0[1])/wd)**2)
decay_env = amp * np.exp(-z*wn*t)
# plot the decay envelope
plt.plot(t, decay_env, linewidth=1.0, linestyle = '--', color = "red")
plt.plot(t, -decay_env, linewidth=1.0, linestyle = '--', color = "red")
plt.plot(t, x, linewidth=2, linestyle = '-', label=r'Response')
# uncomment below and set limits if needed
# xlim(0,5)
# ylim(0,10)
plt.yticks([-1.5, -1, -0.5, 0, 0.5, 1, 1.5], ['', r'$-x_0$', '', '0', '', r'$x_0$', ''])
plt.annotate('Exponenciální obálka',
xy=(t[int(len(t)/3)],decay_env[int(len(t)/3)]), xycoords='data',
xytext=(+10, +30), textcoords='offset points', fontsize=18,
arrowprops=dict(arrowstyle="simple, head_width = 0.35, tail_width=0.05", connectionstyle="arc3, rad=.2", color="#377eb8"), color = "#377eb8")
# # Create the legend, then fix the fontsize
# leg = plt.legend(loc='upper right', fancybox=True)
# ltext = leg.get_texts()
# plt.setp(ltext,family='serif',fontsize=18)
# Adjust the page layout filling the page using the new tight_layout command
plt.tight_layout(pad = 0.5)
# save the figure as a high-res pdf in the current folder
# It's saved at the original 6x4 size
# plt.savefig('MCHE485_FreeVibrationWithDamping.pdf')
fig.set_size_inches(9, 6) # Resize the figure for better display in the notebook