Kinematika v 1DOF prostoru#
import numpy as np
import matplotlib.pyplot as plt
from IPython.display import IFrame
Poloha v 1D#
1D prostor, neboli jednorozměrný prostor, je koncept, který se používá k popisu objektů nebo jevů, které mají pouze jednu dimenzi. Představte si přímku: ta je nekonečně dlouhá, ale nemá žádnou šířku ani hloubku. Vše, co se v 1D prostoru nachází, se dá popsat pouze pomocí jedné souřadnice.
Za 1D prostor můžeme považovat také prostor, kdy pro popsání polohý nám stačí jedna souřadnice. I když se auto pohybuje v 3D prostoru, pro popsání jeho polohy na dálnici nám stačí pouze jedna souřadnice – vzdálenost od počátečního bodu dálnice. Poloha je omezena na jednu dimenzi, i když se odehrává v prostoru s vyšší dimenzí.
Warning
V případě obecného křivočarého pohybu vznikají neinerciální zrychlení a síly, např dostředivé zrychlení při pohybu po kružnici.
Jak si představit 1D prostor
Přímka: Nejjednodušší způsob, jak si představit 1D prostor, je jako přímku. Každý bod na této přímce je určen pouze jednou souřadnicí, která udává jeho vzdálenost od počátku.
Časová osa: Časová osa je také příkladem 1D prostoru. Události se odehrávají v čase a dají se popsat pouze jednou souřadnicí – časem.
Struna: Vibrující struna je fyzikální příklad 1D prostoru. Pohyb bodů na struně se dá popsat pouze jednou souřadnicí – vzdáleností od jednoho konce struny.
Matematický popis 1D prostoru
1D prostor se matematicky popisuje pomocí:
Reálných čísel: Každý bod v 1D prostoru je reprezentován reálným číslem.
Souřadnicové osy: 1D prostor má pouze jednu souřadnicovou osu, obvykle označenou jako osa x.
Vzdálenosti: Vzdálenost mezi dvěma body v 1D prostoru se vypočítá jako absolutní hodnota rozdílu jejich souřadnic.
Pohyb v 1D#
Pro další popis budeme vycházet z definice pohybu. Samotnou změnu fyzikální veličiny označujeme v mechanice symbolem \(\Delta\). Například pro změnu času označíme jako \(\Delta t\). Znamená to:
Začneme-li pohyb v čase 12 hodin 20 minut a ukočníme ho v čase 12 hodin 21 minut, trval daný pohyb 1 minutu. S popisem změny polohy je to o něco komplikovanější vzhledem k rozdělení pohybu. Kůli jednoduchosti budeme uvažovat nejjednodušší způsob měření pohybu u pohybu posuvného. Pohyb po kružnici si probereme samostatně v části periodického pohybu.
Translační pohyb#
Za nejjednodušší posuvný pohyb budeme považovat pohyb běžce po přímé dráze. Jakým způsobem by jsme mohli určit jeho polohu? Příkladem může být původní měření běhu.

Souřadnicová osa#
Počátek souřadnic: Zvolený bod na přímce, od kterého měříme vzdálenosti.
Kladný směr: Směr, ve kterém rostou kladné hodnoty souřadnice.
Záporný směr: Směr opačný ke kladnému směru.

Poloha bodu#
Souřadnice: Číselná hodnota udávající vzdálenost bodu od počátku souřadnic ve zvoleném směru. V případě pohybu po přímce nám stačí jedna hodnota \(x\).
Změna polohy#
Posunutí: Změna polohy bodu v čase. Je to vektorová veličina, která má velikost (dráhu) a směr. Označujeme jí \(\vec{\mathbf{d}}\).
Zápis pohybu#
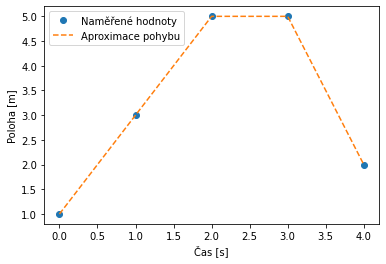
Možný zápis pohybu je tabulkou, kde vyjádříme jednotlivé body
Čas \(t\) [s] |
Poloha \(x\) [m] |
|---|---|
0 |
1 |
1 |
3 |
2 |
5 |
3 |
5 |
4 |
2 |
Zobrazení pomocí tabulky může být nepřehledné když máme velké množství bodů. Proto je výhodnější po popis polohy použít graf. Při spojení jednotlivých naměřených bodů vždy pohyb aproximujeme.
t = [0,1,2,3,4]
x = [1,3,5,5,2]
plt.plot(t,x, "o", label="Naměřené hodnoty")
plt.plot(t,x, "--", label="Aproximace pohybu")
plt.xlabel("Čas [s]")
plt.ylabel("Poloha [m]")
plt.legend()
plt.show()
Warning
V případě malého počtu naměřených bodů nebo jejich malé frekvence měření vůči pohybu je aproximace pohybu nepřesná.
Kinematika#
Kinematika je odvětví klasické mechaniky, které popisuje pohyb objektů bez uvážení příčin pohybu (Wikipedia).
Kinematika částice je popis pohybu, když je objekt považován za částici.
Částice jako fyzický objekt v přírodě neexistuje; je to zjednodušení pro pochopení pohybu tělesa nebo je to pojmová definice, jako je těžiště soustavy objektů.
Dráha, rychlost a zrychlení jsou tři základní veličiny popisující pohyb tělesa. Mezi nimi existují úzké vztahy, které nám umožňují popsat a analyzovat pohyb tělesa.
Dráha#
Dráha je délka trajektorie, kterou urazí těleso při svém pohybu. Je to skalární veličina a značí se obvykle písmenem s.
Rychlost#
Průměrná rychlost mezi dvěma okamžiky je:
Okamžitá rychlost částice se získá, když se \(\Delta t\) přiblíží k nule.
Note
V mechanice se často setkáváme s časovými derivacemi, tedy derivacemi funkcí, které závisí na čase. Pro zjednodušení zápisu a usnadnění práce s těmito derivacemi se používá speciální značení pomocí teček nad symbolem veličiny. Toto značení zavedl Isaac Newton.
První časová derivace: Značí se jednou tečkou nad symbolem veličiny. Například, pokud \(x\) značí polohu, pak \(\dot{x}\) (x s tečkou) značí její první časovou derivaci, tedy rychlost:
\[\dot{x} = \frac{dx}{dt}\]Druhá časová derivace: Značí se dvěma tečkami nad symbolem veličiny. Například, \(\ddot{x}\) (x se dvěma tečkami) značí druhou časovou derivaci polohy, tedy zrychlení:
Třetí a vyšší časové derivace: Značí se třemi a více tečkami nad symbolem veličiny. Vyšší časové derivace se používají méně často, ale mohou se objevit například při popisu dynamiky pohybu.
Rychlost je relativní#
Rychlost je vždy relativní. To znamená, že se udává vzhledem k nějakému referenčnímu bodu nebo soustavě. Neexistuje absolutní rychlost. Pojďme si to ilustrovat na několika příkladech s ohledem na Zemi, Slunce a centrum naší Galaxie, Mléčné dráhy.
1. Vzhledem k Zemi:
Chůze: Člověk jde rychlostí například 5 km/h. Tato rychlost je vzhledem k povrchu Země.
Auto: Auto jede rychlostí 100 km/h. Opět, tato rychlost je vzhledem k Zemi.
Letadlo: Letadlo letí rychlostí 900 km/h. Tato rychlost je vzhledem k Zemi.
V těchto příkladech je Země naše nejpřirozenější referenční soustava. Všichni se pohybujeme po Zemi a proto nám tyto rychlosti dávají největší smysl.
2. Vzhledem ke Slunci:
Země obíhá kolem Slunce. To znamená, že i když stojíme na Zemi, pohybujeme se obrovskou rychlostí vzhledem ke Slunci.
Rychlost Země kolem Slunce: Přibližně 30 km/s (108 000 km/h). To je mnohem rychleji, než cokoliv, co běžně zažíváme na Zemi. I když sedíte v klidu doma, pohybujete se touto obrovskou rychlostí vzhledem ke Slunci.
Rychlost sondy Voyager 1 (vzhledem ke Slunci): Voyager 1, jedna z nejvzdálenějších sond od Země, se pohybuje rychlostí přibližně 17 km/s (61 200 km/h) vzhledem ke Slunci.
Zde vidíme, že i relativně “pomalu” se pohybující tělesa (jako Země) mají obrovské rychlosti, pokud změníme referenční soustavu na Slunce.
3. Vzhledem k centru Galaxie:
Slunce a celá Sluneční soustava obíhají kolem centra Mléčné dráhy. I zde se pohybujeme obrovskou rychlostí.
Rychlost Slunce kolem centra Galaxie: Přibližně 220 km/s (828 000 km/h). To je ještě mnohem rychlejší než pohyb Země kolem Slunce! I Slunce, obrovská a zdánlivě nehybná hvězda, se řítí vesmírem obrovskou rychlostí vzhledem k centru Galaxie.
Zde je Země pouze malou planetou obíhající kolem Slunce, které je jednou z miliard hvězd obíhajících centrum Galaxie. Proto se naše rychlost vzhledem k centru Galaxie skládá z rychlosti Země kolem Slunce a rychlosti Slunce kolem centra Galaxie.
Shrnutí:
Vzhledem k |
Příklad |
Rychlost (přibližně) |
|---|---|---|
Zemi |
Chůze |
5 km/h |
Rovník |
Osa otáčení Země |
1674 km/h |
Slunci |
Země |
108 000 km/h) |
Centru Galaxie |
Slunce |
828 000 km/h) |
Mléčna dráha |
ostatní galaxie |
2.2 miliona km/h |
Zdroj: Britannica.com |
Zrychlení#
Zrychlení je změna rychlosti bodu, která může být dána i rychlostí změny polohy druhého řádu. Střední zrychlení mezi dvěma okamžiky je:
Podobně okamžité zrychlení je derivace prvního řádu rychlosti nebo derivace druhého řádu polohového vektoru:
Ryv (Jerk)#
Ryv (anglicky jerk) je fyzikální veličina, která popisuje změnu zrychlení v čase. Udává, jak rychle se zrychlení tělesa mění. Je to vektorová veličina, což znamená, že má velikost a směr.
Ryv se značí písmenem \(j\) a jeho definiční vztah je dán derivací zrychlení (\(a\)) podle času (\(t\)):
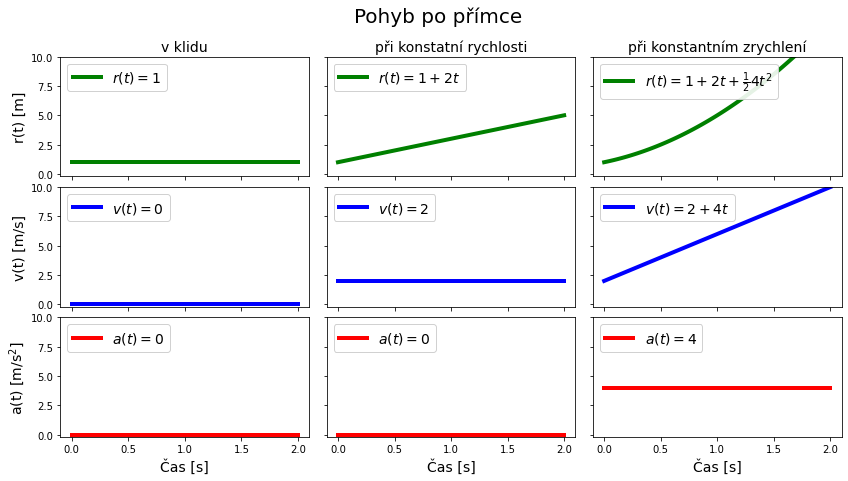
Příklady pohybu v 1D#
Bod při konstantní rychlosti#
Bod při konstantním zrychlení#
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
t = np.linspace(0, 2, 101)
r0 = 1
v0 = 2
a0 = 4
plt.rc('axes', labelsize=14, titlesize=14)
plt.rc('xtick', labelsize=10)
plt.rc('ytick', labelsize=10)
f, axarr = plt.subplots(3, 3, sharex = True, sharey = True, figsize=(14,7))
plt.suptitle('Pohyb po přímce', fontsize=20);
tones = np.ones(np.size(t))
axarr[0, 0].set_title('v klidu', fontsize=14);
axarr[0, 0].plot(t, r0*tones, 'g', linewidth=4, label='$r(t)=1$')
axarr[1, 0].plot(t, 0*tones, 'b', linewidth=4, label='$v(t)=0$')
axarr[2, 0].plot(t, 0*tones, 'r', linewidth=4, label='$a(t)=0$')
axarr[0, 0].set_ylabel('r(t) [m]')
axarr[1, 0].set_ylabel('v(t) [m/s]')
axarr[2, 0].set_ylabel('a(t) [m/s$^2$]')
axarr[0, 1].set_title('při konstatní rychlosti');
axarr[0, 1].plot(t, r0*tones+v0*t, 'g', linewidth=4, label='$r(t)=1+2t$')
axarr[1, 1].plot(t, v0*tones, 'b', linewidth=4, label='$v(t)=2$')
axarr[2, 1].plot(t, 0*tones, 'r', linewidth=4, label='$a(t)=0$')
axarr[0, 2].set_title('při konstantním zrychlení');
axarr[0, 2].plot(t, r0*tones+v0*t+1/2.*a0*t**2,'g', linewidth=4,
label='$r(t)=1+2t+\\frac{1}{2}4t^2$')
axarr[1, 2].plot(t, v0*tones+a0*t, 'b', linewidth=4,
label='$v(t)=2+4t$')
axarr[2, 2].plot(t, a0*tones, 'r', linewidth=4,
label='$a(t)=4$')
for i in range(3):
axarr[2, i].set_xlabel('Čas [s]');
for j in range(3):
axarr[i,j].set_ylim((-.2, 10))
axarr[i,j].legend(loc = 'upper left', frameon=True, framealpha = 0.9, fontsize=14)
plt.subplots_adjust(hspace=0.09, wspace=0.07)
Kinematika závodu na 100 m#
Příkladem, kde lze analýzu některých aspektů pohybu lidského těla zredukovat na analýzu bodu, je studium biomechaniky běhu na 100 metrů.
Technickou zprávu s kinematickými daty pro světový rekord na 100 m od Usaina Bolta si můžete stáhnout z website for Research Projects od Mezinárodní asociace atletických federací. Tady je přímý odkaz. Konkrétně následující tabulka ukazuje údaje pro tři medailisty v tomto závodě:

Sloupec RT v tabulce výše se týká reakční doby každého sportovce. IAAF má velmi přísné pravidlo o reakční době: každý sportovec s reakční dobou kratší než 100 ms je ze soutěže diskvalifikován! Diskuzi o tomto pravidle naleznete na webu Reaction Times and Sprint False Starts.
Svou vlastní reakční dobu si můžete změřit jednoduchým způsobem na této webové stránce: http://www.humanbenchmark.com/tests/reactiontime.
Článek A Kinematics Analysis Of Three Best 100 M Performances Ever od Krzysztofa a Mera představuje podrobnou kinematickou analýzu závodů na 100 m.
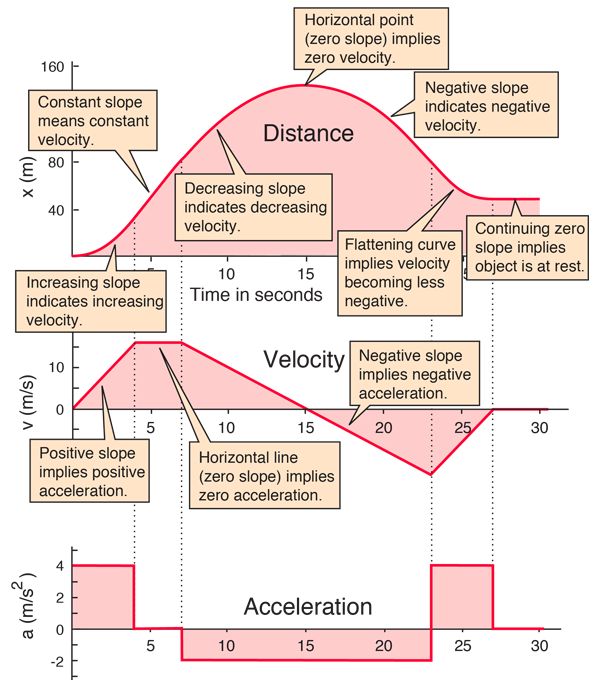
Vztah mezi dráhou, rychlostí a zrychlením#
Graf dráhy: Ukazuje, jak se mění poloha tělesa v čase.
Graf rychlosti: Ukazuje, jak se mění rychlost tělesa v čase.
Graf zrychlení: Ukazuje, jak se mění zrychlení tělesa v čase.
Při rovnoměrném přímočarém pohybu: Rychlost je konstantní a dráha je přímo úměrná času, zrychlení je nulové.
Při rovnoměrně zrychleném přímočarém pohybu: Rychlost se lineárně zvětšuje s časem a dráha se mění kvadraticky s časem.
Note
Obecně:
Sklon grafu dráhy určuje velikost rychlosti
Sklon grafu rychlosti určuje velikost zrychlení
Plocha pod grafem zrychlení je rovná změně rychlosti
Plocha po grafem dráhy je rovna změně dráhy
from IPython.display import IFrame
IFrame('https://www.geogebra.org/classic/pdNj3DgD', width=800, height=600, style="border: 1px solid black")