Dynamika oscilátoru#
import numpy as np
import matplotlib as plt
Proč vzniká kmitavý pohyb#
Newtonovy zákony a oscilační pohyb:
První Newtonův zákon, zákon setrvačnosti, postuluje, že těleso setrvává v klidu nebo v rovnoměrném přímočarém pohybu, pokud na něj nepůsobí vnější síla. Z toho plyne, že oscilující těleso, měnící směr svého pohybu, je nutně vystaveno působení sil.
Analýza sil v oscilačním systému:
Uvažujme jednorozměrný oscilátor, jehož polohu popisuje souřadnice \(x\). Pokud oscilátor vykonává pohyb podél osy \(x\), pak v každém okamžiku platí:
Když je \(x > 0\) (těleso vychýleno doprava), působí na něj síla \(F < 0\) (směřující doleva).
Když je \(x < 0\) (těleso vychýleno doleva), působí na něj síla \(F > 0\) (směřující doprava).
Z této analýzy vyplývá existence bodu, kde \(F = 0\), což definuje rovnovážnou polohu systému. Konvenčně se počátek souřadnicového systému umisťuje do této rovnovážné polohy (\(x = 0\)).
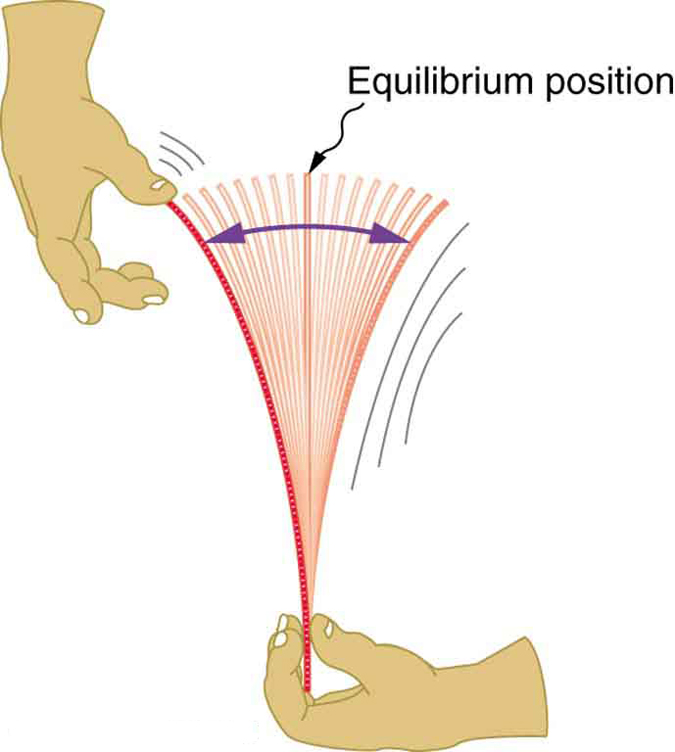
Příklad: Oscilace plastového pravítka:
Demonstrativním příkladem oscilačního pohybu je vychýlení plastového pravítka z jeho stabilní vertikální polohy.
Vratná síla: Deformace pravítka indukuje vratnou sílu, která působí proti směru vychýlení. Tato síla se snaží vrátit pravítko do rovnovážné polohy.
Hybnost: Po uvolnění pravítka vratná síla urychluje jeho pohyb směrem k rovnovážné poloze. V důsledku hybnosti pravítko pokračuje v pohybu i po dosažení rovnovážné polohy, čímž dochází k vychýlení na opačnou stranu.
Tlumení: Reálné systémy jsou ovlivněny disipativními silami (např. třením), které postupně snižují amplitudu oscilací až do úplného zastavení pohybu.
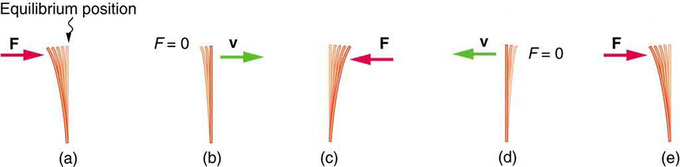
Dynamická analýza oscilačního cyklu:
Po vychýlení pravítka z rovnovážné polohy působí vratná síla, která ho urychluje zpět.
V rovnovážné poloze je výsledná síla nulová, ale pravítko má nenulovou hybnost, která ho unáší na opačnou stranu.
Na opačné straně působí vratná síla v opačném směru, čímž zpomaluje a zastavuje pohyb pravítka.
Proces se opakuje, přičemž amplituda oscilací se postupně snižuje v důsledku tlumení.
Pohybová rovnice oscilátoru#
Pro jednorozměrný jednoduchý harmonický pohyb lze rovnici pohybu (což je lineární diferenciální rovnice druhého řádu s konstantními koeficienty) odvodit pomocí druhého Newtonova zákona a Hookeova zákona.
kde \(m\) je hmotnost oscilujícího tělesa, \(x\) je jeho posunutí z rovnovážné polohy a \(k\) je konstanta pružiny. Proto:
Řešením výše uvedené diferenciální rovnice je sinusoidální funkce:
Použijeme součtový vzorec: \(\sin(\alpha + \varphi) = \sin(\alpha)\cos(\varphi) + \cos(\alpha)\sin(\varphi)\)
Násobíme \(A\): \(A\sin(\alpha + \varphi) = A\sin(\alpha)\cos(\varphi) + A\cos(\alpha)\sin(\varphi)\)
Porovnáme s původním výrazem:
\(c_1 = A\sin(\varphi)\)
\(c_2 = A\cos(\varphi)\)
Odvodíme:
\(A = \sqrt{a^2 + b^2}\)
\(\varphi = \arctan\left(\frac{a}{b}\right)\)
Můžeme tedy řešení uvedené rovnice napsat ve tvaru:
kde:
Caution
Součet dvou harmonických kmitů o stejné úhlové rychlosti je harmonický kmit se stejnou frekvencí a fázovým posuvem.
V řešení jsou \(c_1\) a \(c_2\) dvě konstanty určené počátečními podmínkami a počátek je nastaven v rovnovážné poloze. Každá z těchto konstant nese fyzikální význam pohybu: \(A\) je amplituda (maximální posunutí z rovnovážné polohy), \(\omega = 2\pi f\) je úhlová frekvence a \(\varphi_0\) je fáze.
Protože \(\omega = 2\pi f\), platí:
Vzhledem k tomu, že \(T = \frac{1}{f}\), platí:
Vlastní frekvence oscilátoru#
Vlastní frekvence oscilátoru je frekvence, na které oscilátor přirozeně kmitá, když je vychýlen z rovnovážné polohy a uvolněn. Jinými slovy, je to frekvence, na které oscilátor kmitá bez působení vnější síly.
Závisí na vlastnostech oscilátoru:
Vlastní frekvence je určena fyzikálními vlastnostmi oscilátoru (hmotnost, tuhost, délka, atd.).
Nezávisí na amplitudě (u lineárních oscilátorů):
U ideálních oscilátorů je vlastní frekvence konstantní bez ohledu na amplitudu.