Úvod do mechaniky#
Co je to mechanika?#
Mechanika je matematická věda, která studuje pohyb těles pod vlivem sil.
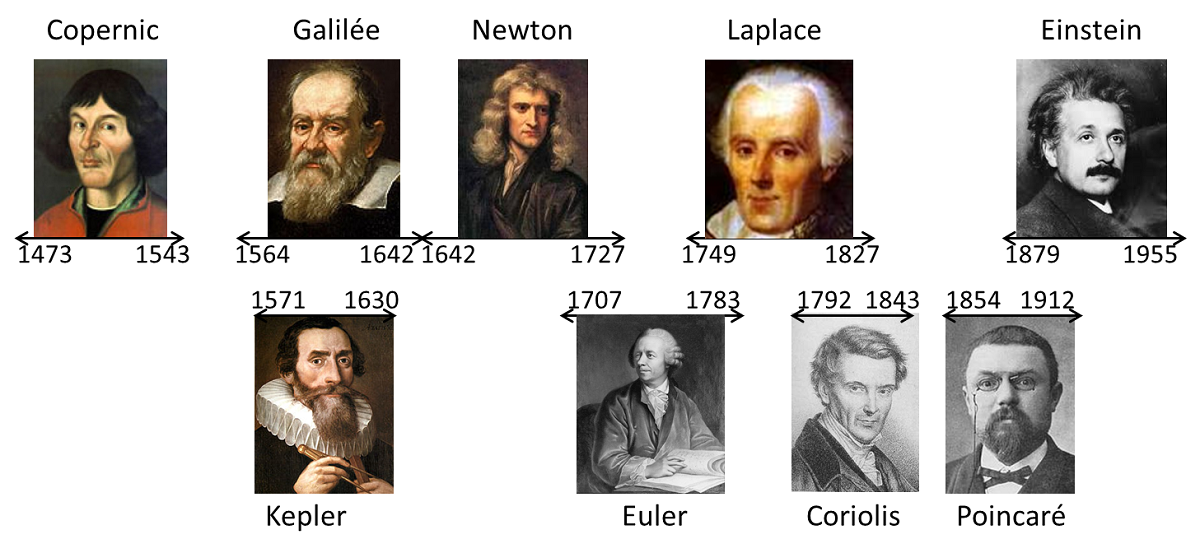
Historie mechaniky#
Galileo Galilei zahájil moderní éru mechaniky použitím matematiky k popisu pohybu těles. Jeho Mechanika, publikovaná v roce 1623, představila koncept síly a popsala konstantně zrychlený pohyb objektů v blízkosti povrchu Země.
O šedesát let později Isaac Newton formuloval své zákony pohybu, které publikoval v roce 1687 pod názvem Philosophiae Naturalis Principia Mathematica. Ve třetí knize, nazvané De mundi systemate, Newton vyřešil největší vědecký problém své doby použitím svého univerzálního gravitačního zákona k určení pohybu planet. Newton zavedl matematický přístup k analýze fyzikálních jevů a odmítl hypotézy bez experimentálního základu.
Tento přístup vedl k rozsáhlému rozvoji Newtonovské mechaniky a vrcholil pracemi Lenarda Eulera, který systematicky studoval trojrozměrný pohyb tuhých těles a formuloval rovnice pohybu tuhého tělesa známé jako Eulerovy rovnice. Významný přínos k rozvoji mechaniky měl také Joseph-Louis Lagrange, který zformuloval analytickou mechaniku založenou na principech variačního počtu. Lagrangeova mechanika poskytla elegantní a obecný přístup k řešení mechanických problémů prostřednictvím Lagrangeových rovnic druhého druhu, které umožňují popis dynamiky systémů bez nutnosti explicitního uvažování sil působících na jednotlivé částice. Během tohoto vývoje se postupně formoval i koncept energie, což vyvrcholilo v polovině 19. století objevem principu zachování energie a jeho aplikací na termodynamiku. Zachovávací principy, včetně zachování hybnosti, energie a momentu hybnosti, se staly klíčovými v klasické mechanice.
Newtonovská mechanika byla dále aplikována na systémy složené z mnoha částic, což vedlo k rozvoji mechaniky kontinua a teorií mechaniky tekutin, vlnové mechaniky a elektromagnetismu. Vývoj vlnové teorie světla přinesl otázky ohledně existence éteru, které byly vyvráceny Michelson-Morleyho experimentem v roce 1887. Následně Albert Einstein ve své speciální teorii relativity (1905) přehodnotil koncepty prostoru a času, čímž vyřešil rozpory mezi optikou a Newtonovskou mechanikou.
Další omezení Newtonovské mechaniky se objevily na mikroskopické úrovni. Statistická mechanika byla vyvinuta k propojení mikroskopických vlastností atomů a molekul s makroskopickými termodynamickými vlastnostmi materiálů. Začátkem 20. století kvantová mechanika poskytla matematický popis mikroskopických jevů, který plně odpovídal experimentálním pozorováním.
Ve 20. století se ukázalo, že Newtonův gravitační zákon již přesně nepopisuje velkorozměrový vesmír a byl nahrazen obecnou relativitou. Pozorování jako zrychlená expanze vesmíru na konci 20. a počátku 21. století vedla k zavedení nových konceptů, jako je temná energie, což opět vyžaduje přehodnocení základních fyzikálních konceptů.
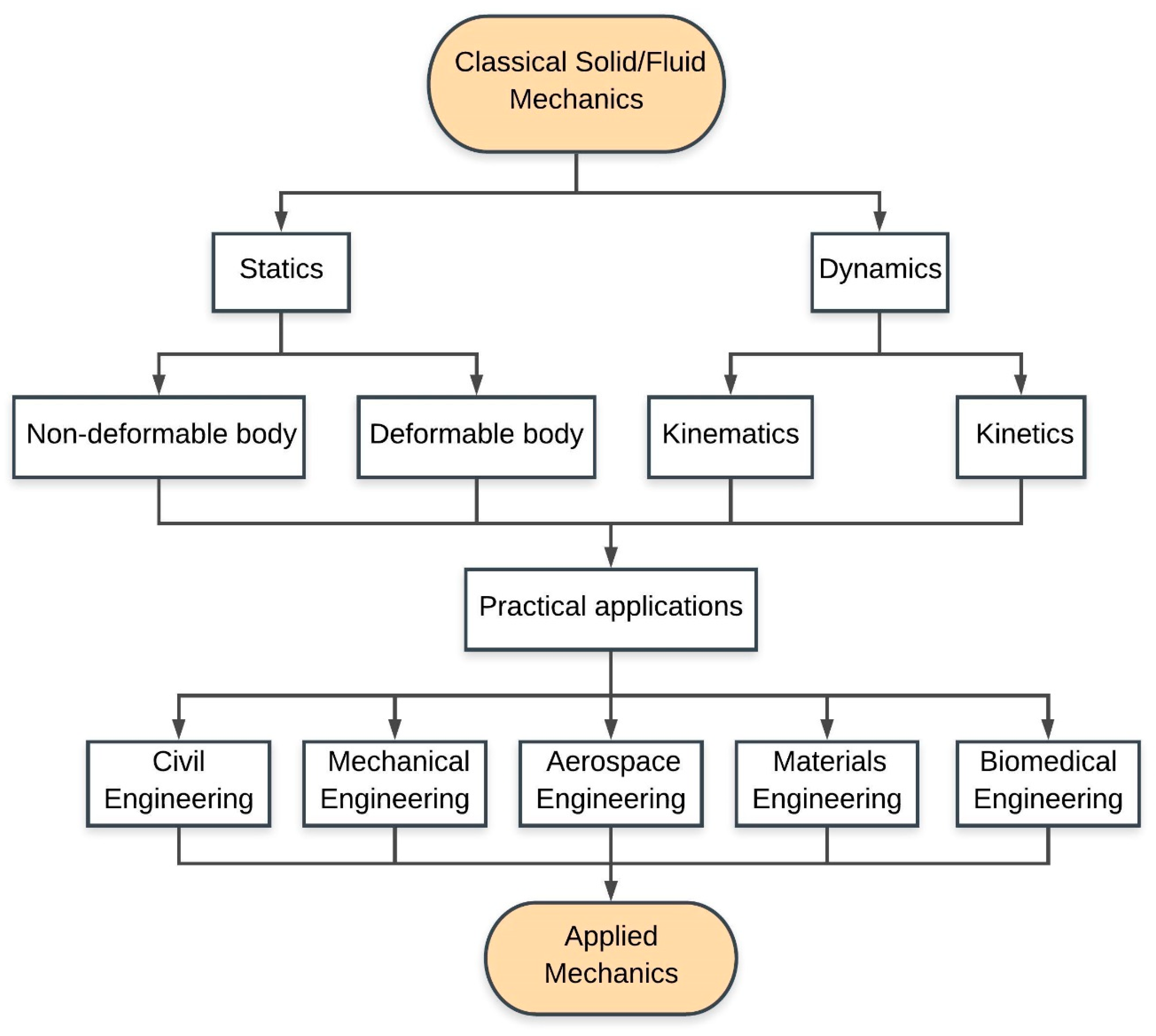
Dělí se na několik hlavních oblastí:
Dělení mechaniky#
Klasická mechanika – zahrnuje Newtonovu mechaniku, analytickou mechaniku (Lagrangeovu a Hamiltonovu) a mechaniku kontinua.
Relativistická mechanika – zabývá se pohybem těles při rychlostech blízkých rychlosti světla (Einsteinova teorie relativity).
Kvantová mechanika – popisuje chování částic na mikroskopické úrovni, kde selhává klasická mechanika.
Statistická mechanika – propojuje mikroskopické vlastnosti částic s makroskopickými vlastnostmi systémů.
V rámci jednosemstrálního kuzru mechaniky se budeme primárně zabývat klasickou mechaniku s jemným nahldénutím do statistické mechaniky při definici entropie. V mechanice, postupuje od elementárního k pokročilému čtyřmi obecnými způsoby:
Počet prostorových dimenzí.
Jednorozměrná mechanika je nejjednodušší. Všechny síly působí v jednom směru, například ve směru osy x (nebo opačném), a nebere se v úvahu 2D nebo 3D geometrie. Někteří lidé tomu říkají „skalární“ mechanika, protože vektory mají v 1D minimální využití.
Rovinná neboli 2D mechanika je další v pořadí obtížnosti. 2D mechanika je nejvíce zdůrazňována v jednoduchých aplikacích. Geometrie je důležitá, ale ne příliš složitá.
3D mechanika je nejobtížnější. Geometrie tří rozměrů je překvapivě obtížnější než dvě dimenze.
Složitost pohybu.
Statika, která předpokládá žádný pohyb (nebo přesněji, zanedbatelné zrychlení), je nejjednodušší.
Přímočarý pohyb je další v pořadí obtížnosti za předpokladu, že se všechny body pohybují rovnoběžně s jednou danou přímkou, například osou x.
Pohyb po kružnici se týká systémů, kde se všechny body pohybují po kruzích kolem daného bodu v rovině nebo, ve 3D, kolem dané pevné osy.
Obecný pohyb, kde se body a objekty mohou pohybovat jakýmkoli způsobem, je nejobecnější a nejobtížnější.
Složitost systému. V přibližném pořadí obtížnosti mohou být systémy, které lze studovat v mechanice částic a tuhých těles, následující:
Jedna částice (hmotný bod).
Systém částic.
Tuhé těleso.
Soustava částic a tuhých těles.
Typ interakce. Části systému interagují mezi sebou silami. V dynamice je s některými interakcemi snazší se vypořádat než s jinými.
Síly určené polohami a rychlostmi. Nejjednodušší interakce jsou, když síly pocházejí z pružin, tlumičů a gravitace. To znamená, že síly lze nalézt přímo, pokud znáte polohy a rychlosti všech objektů.
Síly a zrychlení jsou spojené. Jedná se o systémy, které mají části, které interagují s vazbami, jako jsou závěsy a kluzné spoje. Tyto „kinematické“ vazby se používají k popisu mechanismů.
Předchozí znalosti#
Matematika: Předpokládá se, že studenti mají znalosti ze základní geometrie, algebry, trigonometrie, derivace a integrace. Některá z těchto témat budou krátce vysvětlena, ale ne jako ab initio tutoriály. Ukážeme si jak využít řešení algebraických a diferenciálních rovnic k řešení problémů mechaniky.
Programování: Potřebujete znát, nebo se současně učit počítačový jazyk nebo software, který dokáže řešit prlbémy lineární algebraiky rovnic, numericky integrovat jednoduché obyčejné diferenciální rovnice a dělat slušné grafy. V rámci našeho kurzu budeme primárně používat programovací jazyk Python. V případě, že tento jazyk neovládáte, můžete také využít Matlab nebo Matematiku.
Co obsahuje tento kurz#
Upozornění: Obsah kurzu se může měnit v průběhu semestru.
Obsah kurzu je následující:
Úvod
Definice rozdělení a historie mechaniky
Skalární a vektorový počet
Mechanika systémů s 1 stupněm vonosti
Kinematika přímkového pohybu, stupeň volnosti, vztah dráha, rychlost, zrychlení, fyzikální interpretace derivace a integrálu, volný pád, kolmý vrh.
Dynamika pohybu, Newtonovy zákony, zákon zachování hybnosti,
Energie a její zachování, Lagranegeův popis pohybu
Pasivní síly - tření, šikmá rovina,
Měření síly, rychlosti a zrychlení
Přímková silová soustava
Rovnováha, uvolnění, vnější a vnitřní síly
Metoda řezu, posunutí, deformace (relativní a přirozené prodloužení), napětí, t
Tahový diagram, charakteristiky materiálu,
Dimenzování prutu, prut stálé pevnosti,
Deformační energie, rázové namáhání,
Měření napjatosti
Periodický pohyb
Pohyb hmotného bodu po kružnici, kmitání oscilátoru, vlastní, tlmené a buzené kmity,
Kyvadlo – fyzikální a matematické kyvadlo,
Dvojité kyvadlo, Lagrange-Eulerovy rovnice
Pohyb a deformace v rovině
Pohyb hmotného bodu v rovině, superpozice pohybů,
Dynamické rovnice pohybu pro hmotný bod
Pohyb tělesa v rovině, translační a rotační účinky síly, moment síly, páka, Varigninova věta
Poloha těžiště, těžiště a rovnováha, těžiště a energie
Dynamika pohybu v rovině
Moment setrvačnosti, moment hybnosti, Steinerova věta,
Rovnice pohybu tělesa v rovině, interciální síly, Coriolisova síla,
Zákon zachování momentu hybnosti
Rovinný stav napjatosti
Zatížení krutem a smykem
Tensor napětí a deformace, hlavní napětí a hlavní deformace, zobecněný Hookeův zákon
Mohrova kružnice
Membránový stav napjatosti, Laplacova rovnice
Tenzometrická ružice
Nosník a jeho zatížení
Geometrické charakteristiky průřezu, definice neutrální osy,
Dimenzování nosníků
Vzpěr
Pohyb a deformace v prostoru
Pohyb ve třech rozměrech, rovnováha ve třech rozměrech
Vektorový a maticový zápis rovnic rovnováhy a rovnic pohybu
Mechanika mechanismů
Transformační matice pro popis polohy a pohybu
Jednoduchý mechanismus a jeho analýza
Prostorová napjatost
Hlavní napětí a deformace
Redukované napětí ve 3D
Kombinované namáhání – ohyb-ohyb, ohyb-tlak, ohyb-krut.
Hydromechanika
Mechanika kapalin a plynů, hydrostatický paradox,
Laminární a turbulentní proudění, Reynoldsovo číslo, tok a rovnice kontinuity,
Ideální a reálná kapalina a její popis.
Ideální a reální plyn, stavová rovnice plynu
Zákony termodynamiky
Definice entorpie na základě statistické mechaniky
Carnotův cyklus
Tepelné stroje, účinnost
Co neobsahuje tento kurz#
Relativita: Pro fyziky zahrnuje klasická mechanika také speciální a obecnou teorii relativity. Pro fyzika slovo „klasický“ znamená „deterministický“ nebo „nekvantový“, takže relativita, i když přišla stovky let po Newtonovi, se stále nazývá klasickou. Zde však klasická mechanika znamená mechaniku tak, jak ji chápali Newton a Euler. Relativita zde není diskutována.
Teorie ohybu a kroucení: V průběhu semestru se sice naučíme určovat průbeh ohybových momentů, ale nediskutujeme vztah mezi zakřivením a momentem v nosnících ani Mohrův integrál.
Inženýrská termodynamika a hydrodynamika je popsána jenom velice jednoduše bez uvedení přesného inženýrského popisů a aplikací.
Doporučená literatura#
Upozornění: Seznam literatury bude doplňován v průběhu semestru
Classical Mechanics, online učebnice mechaniky, MIT
Andy Ruina and Rudra Pratap: Introduction to Statics and Dynamics, volně dostupná učebnice s propracovanými příklady
Benjamin Crowel: Mechanics opakování středoškolské mechaniky s jemným rozšířením